The 2024 IEEE International Conference on Robotics and Automation (ICRA2024) is the flagship conference of the IEEE (Institute of Electrical and Electronics Engineers) Robotics and Automation Society. This year the event took place from May 13th to 17th in Yokohama, Japan.
ICRA brought together robotics researchers, students and industry partners from around the world to discuss the latest innovations and breakthroughs in robotics and automation.
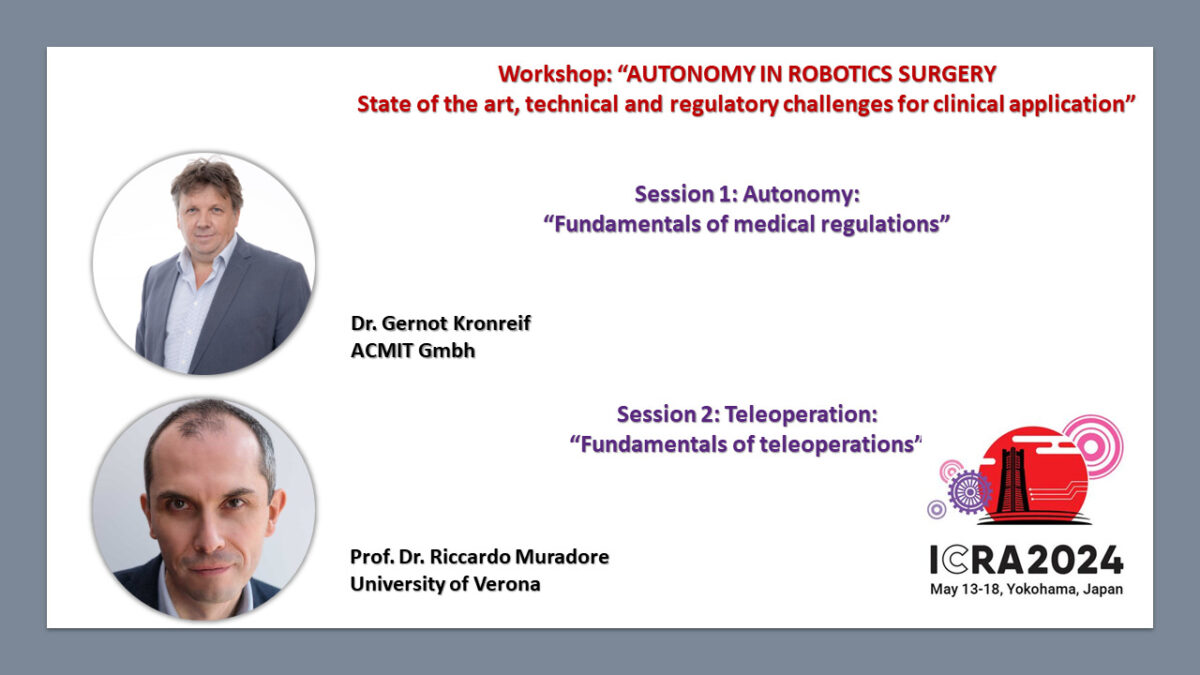
The workshop titled “Autonomy in Robotics Surgery: State of the art, technical and regulatory challenges for clinical application” as a part of ICRA 2024 was organized on May 13th led by experts Prof. Dr. Paolo Fiorini and Prof. Dr. Riccardo Muradore from University Verona.
This tutorial dissected the regulatory challenges posed by the AI Act and delve into the integration of autonomous features into surgical robots. With renowned speakers and interactive sessions, anticipate a day of insightful discussions on the state of the art, technical advancements, and the roadmap for the future of autonomous robotic surgery as related topics of GEYEDANCE.
In this workshop Dr. Gernot Kronreif (Chief Scientific Officer of ACMIT) gave a lecture entitled: “Fundamentals of medical regulations” in the Session 1: Autonomy.
Prof. Dr. Muradore also had a lecture entitled: “Fundamentals of teleoperations” in the Session 2: Teleoperation
For more information, please visit: